






一、機器人手臂控製器行業(ye) 標準剖析
GB/T 39004—2020《工業(ye) 機器人電磁兼容設計規範》
GB/T 37283-2019 服務機器人 電磁兼容 通用標準 抗擾度要求和限值
GB/T 39785-2021 服務機器人 機械安全評估與(yu) 測試方法
GB/T 40014-2021 雙臂工業(ye) 機器人 性能及其試驗方法
GB/T 40013-2021 服務機器人 電氣安全要求及測試方法
GBZ 41046-2021 上肢康複訓練機器人 要求和試驗方法
TGDCKCJH 013-2020 工業(ye) 機器人伺服係統可靠性通用要求
TGDCKCJH 014-2020 工業(ye) 機器人伺服係統可靠性仿真試驗規範
TGDCKCJH 015-2020 工業(ye) 機器人伺服係統可靠性強化試驗方法
TGQDA 00005-2021 機器人控製器加速試驗與(yu) 可靠性指標驗證方法
TSSITS 301-2020 工業(ye) 應用移動機器人 設計通則
1.1 同樣在T/ZXCH 0014- 2023標準中,規定了詳細的試驗方法和檢驗規則。通過這些標準的試驗方法,可以準確測試機器人手臂控製器的各項性能,判斷其是否符合技術要求;檢驗規則則明確了產(chan) 品的合格判定準則,從(cong) 原材料檢驗到成品檢驗,每一個(ge) 環節都有嚴(yan) 格的規範,保證進入市場的機器人手臂控製器質量可靠,為(wei) 用戶提供穩定、高效的使用體(ti) 驗
1.2 GB/T 37283-2019《服務機器人 電磁兼容 通用標準 抗擾度要求和限值》
B 級:服務機器人正常工作時,其性能受到一定電磁幹擾影響,但仍能滿足基本功能要求
|
試驗名稱 |
中國標準 |
國際標準 |
|
靜電放電抗擾度試驗 |
GB/T 17626.2 |
IEC61000-4-2 |
|
射頻電磁場輻射抗擾度試驗 |
GB/T 17626.3 |
IEC61000-4-3 |
|
電快速瞬變脈衝(chong) 群抗擾度試驗 |
GB/T 17626.4 |
IEC61000-4-4 |
|
浪湧(衝(chong) 擊)抗擾度試驗 |
GB/T 17626.5 |
IEC61000-4-5 |
|
射頻場感應的傳(chuan) 導騷擾抗擾度試驗 |
GB/T 17626.6 |
IEC61000-4-6 |
|
工頻磁場抗擾度試驗 |
GB/T 17626.8 |
IEC61000-4-8 |
|
電壓暫降、短時中斷和電壓變化的抗擾度試驗 |
GB/T 17626.11 |
IEC61000-4-11 |
國際標準化組織(ISO)標準
ISO 10218-1:2011 :《機器人與(yu) 機器人裝置 工業(ye) 機器人的安全要求 第 1 部分:機器人》
ISO 10218-2:2011:《機器人與(yu) 機器人裝置 工業(ye) 機器人的安全要求 第 2 部分:機器人係統與(yu) 集成》
ISO/TS 15066:2016:《機器人與(yu) 機器人裝置 協作機器人》
美國標準
ANSI/RIA R15.06-2012:《工業(ye) 機器人和機器人係統 安全要求》
RIA TR R15.606-2016:美國協作機器人安全標準
歐盟標準
EN ISO 10218-1:2011和EN ISO 10218-2:2011
EN 60204-1:《機械安全 機械電氣設備 》
德國
VDI 2057 Blatt 2-2002和VDI 2057 Blatt 2-2012:《人體(ti) 暴露於(yu) 機械振動 手臂振動》
DIN EN ISO 13849-1:2016:《機械安全 控製係統的安全相關(guan) 部件
日本機器人協會(hui) (JARA),ISO 13482 是關(guan) 於(yu) 護理機器人安全性的國際標準
二、機器人手臂控製器EMC電磁兼容
2.1 GB/T 39004—2020《工業(ye) 機器人電磁兼容設計規範》,該標準於(yu) 中國機械工業(ye) 聯合會(hui) 規定了工業(ye) 機器人的示教器、控製櫃、機器人本體(ti) 、印製電路板(PCB)的電磁兼容(EMC)設計要求 2.2 EMC證實方法: 電磁兼容性測試方法:規定了工業(ye) 機器人電磁兼容性的測試方法和程序,包括測試環境、測試設備、測試項目和測試步驟等 設計過程記錄:要求對工業(ye) 機器人電磁兼容設計的過程進行記錄,包括設計文檔、測試報告、整改記錄等,以便於(yu) 追溯和驗證設計的有效性
2.3 工業(ye) 機器人在運行過程中會(hui) 產(chan) 生大量電磁幹擾,同時自身也對外界電磁幹擾敏感。如果電磁兼容性處理不當,不僅(jin) 會(hui) 影響機器人係統的穩定性和精確性,導致動作偏差、數據傳(chuan) 輸錯誤等問題,還可能幹擾周圍設備的正常工作
2.4 以汽車製造自動化生產(chan) 線為(wei) 例,控製機器人手臂的控製係統對電磁幹擾非常敏感,一旦受到幹擾,機器人手臂可能會(hui) 出現動作偏差,影響汽車零部件的安裝質量。因此,對機器人手臂控製器進行EMC設計與(yu) 測試,是確保其在各種電磁環境下可靠運行的關(guan) 鍵,對於(yu) 保障工業(ye) 生產(chan) 的順利進行具有重要意義(yi)
2.5 EMC抗幹擾設計方法
屏蔽 是常見的抗幹擾措施,通過使用金屬屏蔽材料將設備或電路包圍起來,能夠有效阻止外部電磁幹擾進入,同時防止內(nei) 部電磁幹擾泄漏出去;例如,在工業(ye) 電纜中,通常會(hui) 使用金屬屏蔽層來保護電纜內(nei) 部的信號傳(chuan) 輸不受外界幹擾
接地 可以將設備上的電磁幹擾電流引入大地,從(cong) 而降低設備的電磁幹擾水平;在工業(ye) 自動化係統中,會(hui) 根據設備特點和電磁環境選擇單點接地、多點接地等不同的接地方式
合理布局在工業(ye) 自動化設備的設計和安裝過程中,能減少電磁幹擾的產(chan) 生和傳(chuan) 播。比如將強電設備和弱電設備分開布置,避免強電設備對弱電設備產(chan) 生幹擾;合理規劃電纜的走向,避免電纜之間的相互幹擾
濾波 去除電路中的高頻幹擾信號,在電源電路中,常使用電源濾波器來抑製電源線上的電磁幹擾,保證設備獲得穩定、純淨的電源
三、機器人手臂控製器常見問題與(yu) 行業(ye) 痛點洞察
技術瓶頸A 機器人手臂控製器的核心部件和關(guan) 鍵技術仍存在短缺問題,高性能伺服電機、減速器、控製器等技術壁壘高,突破難度大,限製了機器人整體(ti) 性能的提升
技術瓶頸B 智能化、感知能力和適應性仍有待提高。在複雜多變的工作環境中,機器人手臂控製器難以快速、準確地感知環境變化並做出相應調整,無法滿足日益增長的多樣化應用需求
市場困境 目前機器人行業(ye) 市場競爭(zheng) 激烈,同質化現象嚴(yan) 重,許多企業(ye) 為(wei) 了爭(zheng) 奪市場份額,大打價(jia) 格戰,導致整個(ge) 行業(ye) 利潤空間被大幅壓縮,企業(ye) 缺乏足夠的資金投入研發和創新,不利於(yu) 行業(ye) 的健康發展;機器人企業(ye) 在市場開拓方麵麵臨(lin) 諸多困難,一方麵,對市場需求的了解不夠深入,產(chan) 品與(yu) 市場實際需求存在一定偏差;另一方麵,缺乏有效的營銷策略,難以打開新的市場和客戶群體(ti) ,限製了企業(ye) 的發展規模和速度
四、為(wei) 機器人手臂控製器賦能
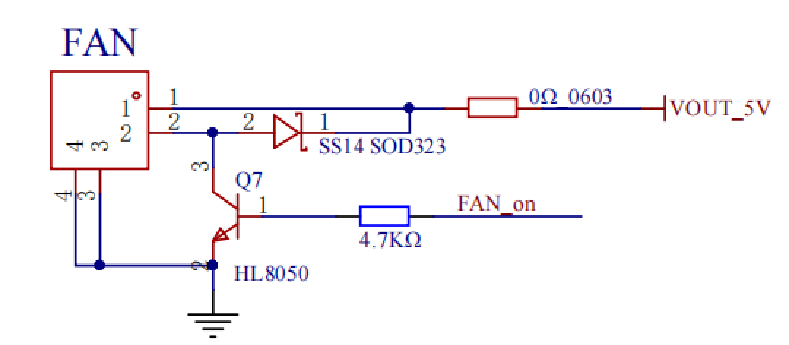
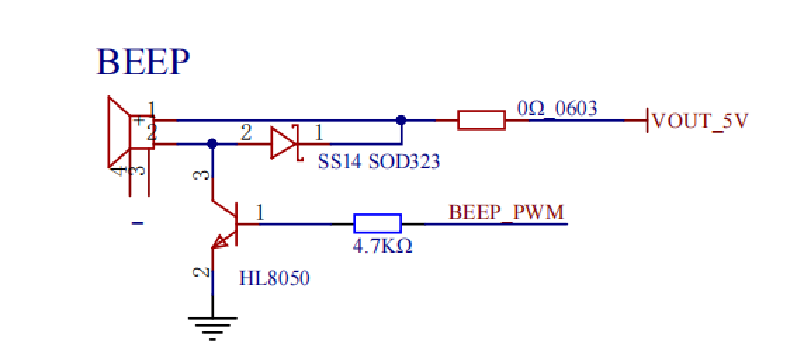
風扇模塊解決(jue) 方案 , 針對機器人手臂控製器的風扇模塊,采用高效散熱設計理念,選用高性能的風扇組件,確保在機器人手臂控製器運行過程中能夠快速、有效地散發熱量, 通過優(you) 化風扇的轉速控製算法,實現根據控製器的溫度實時調節風扇轉速,既能保證良好的散熱效果,又能降低風扇運行產(chan) 生的噪音和能耗,提高係統的穩定性和可靠性;乐天堂FUN88電子能夠提供SS14 ,HL8050
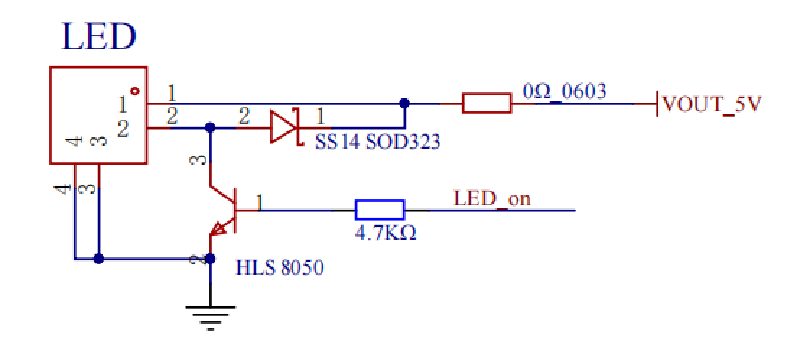
在LED顯示模塊方麵,提供高亮度、高對比度的LED顯示屏,能夠清晰地展示機器人手臂控製器的各種運行狀態信息,如工作模式、故障報警等,確保LED顯示屏的顯示效果穩定,延長顯示屏的使用壽命,乐天堂FUN88電子能夠提供 SS14 、HL8050
對於(yu) BEEP蜂鳴器模塊,使其在機器人手臂控製器出現異常情況時,能夠及時、準確地發出警報聲,引起操作人員的注意,為(wei) 操作人員提供明確的故障提示,便於(yu) 及時采取相應的處理措施;乐天堂FUN88電子能夠提供SS14 ,HL8050
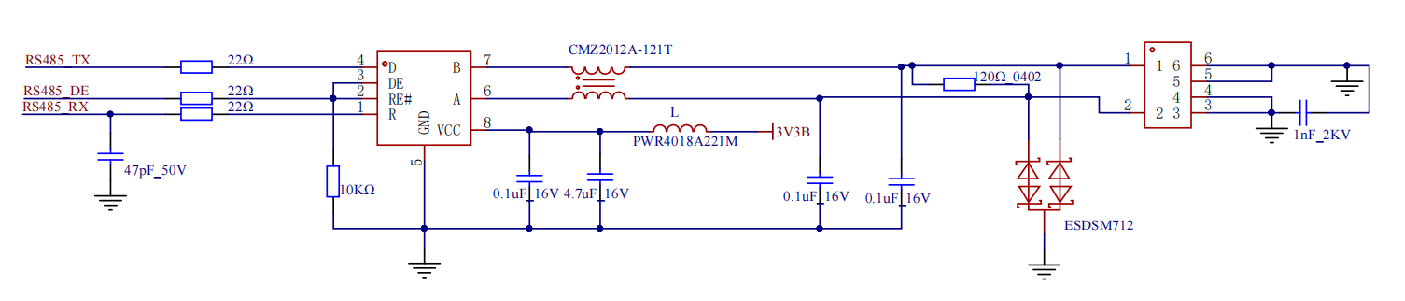
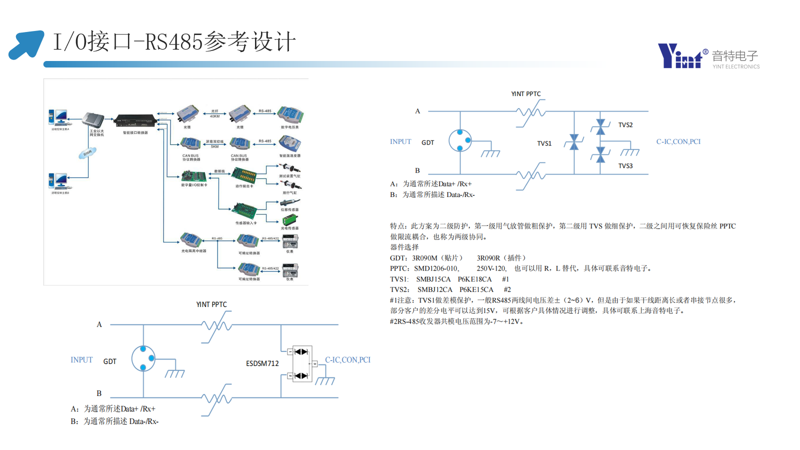
RS485通訊模塊具備高抗幹擾能力,采用先進的差分信號傳(chuan) 輸技術,有效減少信號傳(chuan) 輸過程中的幹擾,確保數據傳(chuan) 輸的準確性和穩定性
CMZ2012-121T 共模電感,提高EMI性能
PWR4018A221M 提高電源的品質
ESDSM712 靜電保護,確保安裝拔插過程的靜電幹擾
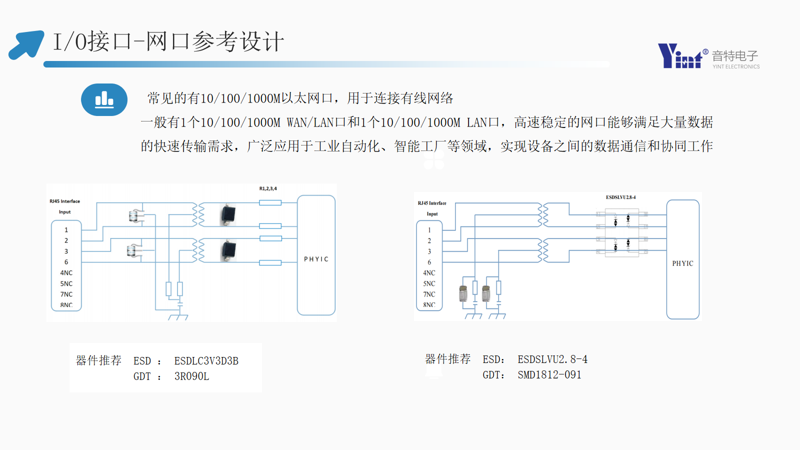
以太網通訊模塊提供高速的網絡連接,采用先進的網絡芯片和優(you) 化的網絡驅動程序,確保機器人手臂控製器能夠快速、穩定地接入以太網,具備網絡自適應功能,可自動識別網絡環境並調整通信參數,實現與(yu) 不同網絡設備的無縫對接。同時,支持多種網絡協議,滿足不同應用場景下的數據傳(chuan) 輸需求很重要
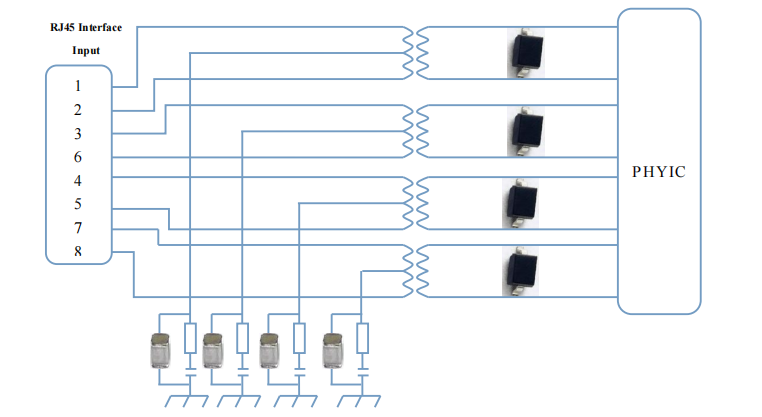
GDT/SMD1812-091
或者 GDT/3R090-8L
區別在於(yu) 第二級防護,由於(yu) 千兆網的傳(chuan) 輸速率更快,對寄生電容值得要求更高,一般推薦 2pF 以下,差分電
壓百兆千兆也有不同,故第二級保護使用的器件也和百兆網不同。乐天堂FUN88推薦使用電容隻有 0.8pF 的
ESDLC3V3D3B,封裝為(wei) SOD323,或者使用乐天堂FUN88電子專(zhuan) 為(wei) 千兆網絡定製的 ESDSLVU2.8-4H,封裝為(wei) SOP-8,使用方
法和百兆網上的 ESDSLVU2.8-4 一樣
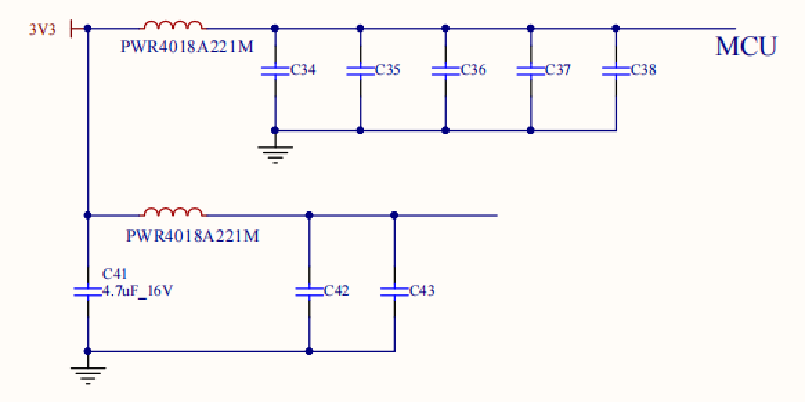
在MCU處理器模塊方麵,除了選用高性能、低功耗的MCU芯片,具備強大的數據處理能力和豐(feng) 富的外設資源,能夠快速響應各種控製指令,實現對機器人手臂的精確控製,對於(yu) MCU的電源供電電源也很關(guan) 鍵
乐天堂FUN88電子提供 PWR4018A221M 濾波電感
致力成為(wei) 全球 EMC電磁兼容技術方案及器件供應商 www.led366.com

一 國內(nei) 及國際行業(ye) 標準
1.1 工業(ye) 互聯網邊緣計算 邊緣網關(guan) 管理接口要求》(YD/T 6119 - 2024)自2025年4月1日實施,它規定了工業(ye) 互聯網邊緣網關(guan) 的北向接口技術要求,包括網元管理接口和虛擬化資源管理接口要求,適用於(yu) 邊緣網關(guan) 節點與(yu) 邊緣雲(yun) 的交互和通信,為(wei) 二者之間的順暢溝通奠定了基礎
1.2 《工業(ye) 互聯網邊緣計算 邊緣節點模型與(yu) 要求 邊緣控製器》規範了邊緣計算節點中的邊緣控製器的模型與(yu) 要求,確保邊緣控製器在整個(ge) 係統中穩定運行,準確執行控製任務
1.3 《工業(ye) 互聯網邊緣計算 邊緣節點模型與(yu) 要求 邊緣雲(yun) 》對邊緣計算節點中的邊緣雲(yun) 的模型與(yu) 要求進行了規範,使得邊緣雲(yun) 能夠高效地存儲(chu) 和處理數據,為(wei) 邊緣計算提供強大的支撐
1.4 《工業(ye) 互聯網邊緣計算 邊緣網關(guan) 技術要求及測試方法》規定了工業(ye) 互聯網邊緣網關(guan) 的技術要求及測試方法等內(nei) 容,為(wei) 邊緣網關(guan) 的研發、生產(chan) 和檢測提供了明確的標準
1.5 《T/JSPAA 006 - 2024工業(ye) 互聯網邊緣計算網關(guan) 技術要求》作為(wei) 中國團體(ti) 標準,規定了工業(ye) 互聯網邊緣計算網關(guan) 參考架構,以及硬件功能、軟件基本功能等方麵的要求,從(cong) 多個(ge) 維度保障了邊緣計算網關(guan) 的質量和性能
國內(nei) 與(yu) 國際標準對比
1.6 在國際上電磁兼容性測試標準主要有IEC標準、ISO標準、EN標準、FCC標準、CISPR標準、MIL - STD標準等。其中IEC標準是關(guan) 於(yu) 電磁兼容性的國際標準,為(wei) 全球電磁兼容測試提供了通用的準則
1.7 不同地區的標準在具體(ti) 要求和側(ce) 重點上存在差異,例如EN標準是歐洲標準,對設備的電磁兼容性要求較為(wei) 嚴(yan) 格,在輻射放射測試、傳(chuan) 導抗擾測試等方麵都有詳細的限值規定;而FCC標準是美國標準,更注重設備對美國本土電磁環境的適應性
1.8 了解國際標準差異,有助於(yu) 邊緣計算網關(guan) 在全球市場的推廣和應用,滿足不同地區客戶的需求,確保產(chan) 品在國際市場上的競爭(zheng) 力
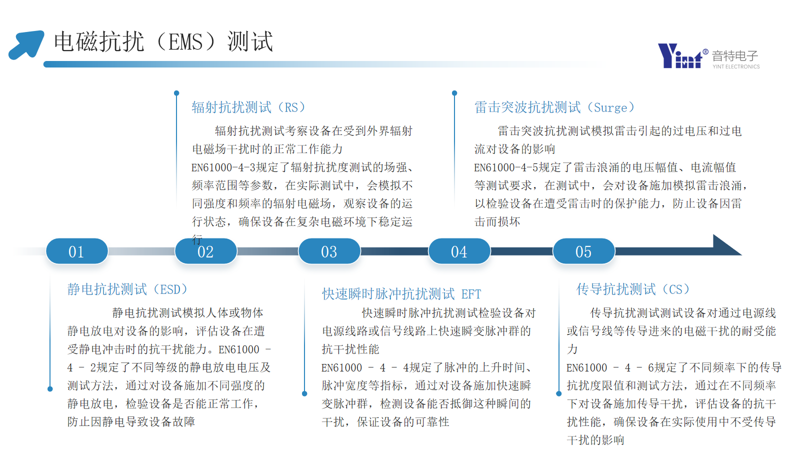
二 EMC電磁兼容標準解讀
2.1 傳(chuan) 導放射測試(CE)傳(chuan) 導放射測試主要測試設備通過電源線或信號線等傳(chuan) 導途徑向外部發射的電磁幹擾信號。限值根據不同頻率範圍有具體(ti) 規定,如EN55011等標準中有詳細要求。在低頻段,限值相對寬鬆,但隨著頻率升高,限值逐漸嚴(yan) 格,以確保設備不會(hui) 對周圍的電子設備產(chan) 生過大的幹擾
2.2 輻射放射測試(RE)輻射放射測試檢測設備向周圍空間輻射的電磁幹擾信號強度。不同頻段有相應的輻射限值標準,如EN55011對不同產(chan) 品在不同距離下的輻射發射有明確限製。對於(yu) 靠近人體(ti) 使用的設備,其輻射限值要求更為(wei) 嚴(yan) 格,以保障人體(ti) 健康
三 內(nei) 部核心模塊
處理器模塊 是邊緣計算網關(guan) 的核心模塊之一,它完成數據處理、協議解析、邊緣計算等核心任務。CPU、GPU、ARM處理器,具有強大的計算能力,能夠快速處理大量的數據,滿足邊緣計算對實時性和高效性的要求,為(wei) 整個(ge) 網關(guan) 的穩定運行提供了有力支持
存儲(chu) 模塊 包括內(nei) 存和外存,用於(yu) 暫存和長期存儲(chu) 數據、程序等。如DDR3內(nei) 存能夠快速讀寫(xie) 數據,為(wei) 處理器提供高效的數據支持,保證係統的運行速度;eMMC閃存則適合長期存儲(chu) 數據和程序,即使在斷電情況下,數據也不會(hui) 丟(diu) 失,確保了網關(guan) 運行的穩定性和數據的安全性
通信模塊實現與(yu) 外部設備或網絡的連接,它包含有線以太網模塊、4G/5G通信模塊、Wi - Fi模塊、藍牙模塊等。有線以太網模塊提供穩定高速的網絡連接,適用於(yu) 對數據傳(chuan) 輸速度和穩定性要求較高的場景;4G/5G通信模塊則使網關(guan) 能夠實現遠程無線通信,方便在移動場景或偏遠地區使用;Wi - Fi模塊和藍牙模塊則用於(yu) 短距離無線通信,便於(yu) 連接周邊的智能設備,實現數據的交互和共享
電源管理模塊負責將輸入電源轉換為(wei) 各模塊所需的穩定電壓,並進行電源分配和管理。有的還具備電源反接保護等功能,確保在電源接入錯誤時,不會(hui) 對網關(guan) 設備造成損壞,保障了設備的安全穩定運行,延長了設備的使用壽命
傳(chuan) 感器接口模塊用於(yu) 連接各類傳(chuan) 感器,實現數據采集。如GPIO、ADC、IIC、UART、PWM、SPI等接口,每種接口都有其獨特的功能和適用場景。GPIO接口可用於(yu) 連接簡單的數字傳(chuan) 感器,實現基本的信號輸入輸出;ADC接口則用於(yu) 將模擬信號轉換為(wei) 數字信號,便於(yu) 處理器處理,適用於(yu) 連接溫度、壓力等模擬傳(chuan) 感器
安全模塊保障設備和數據的安全,它包括加密芯片、安全認證模塊等。加密芯片對數據進行加密處理,防止數據在傳(chuan) 輸和存儲(chu) 過程中被竊取或篡改;安全認證模塊則對訪問設備的用戶進行身份認證,確保隻有授權用戶才能訪問設備和數據,保護了設備和數據的安全性
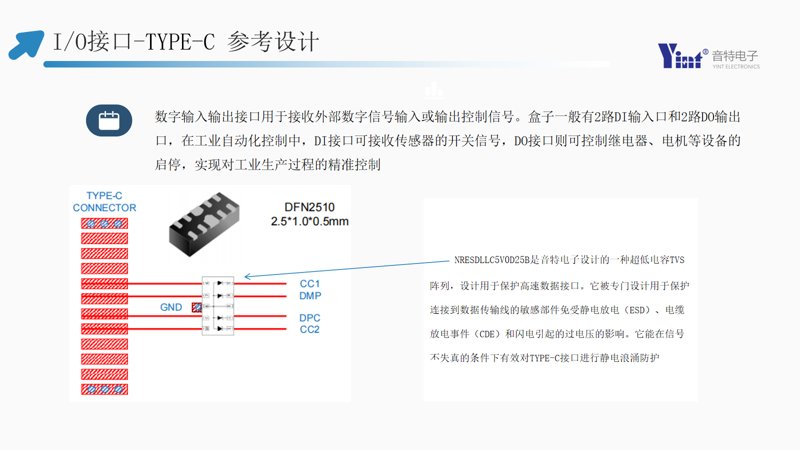
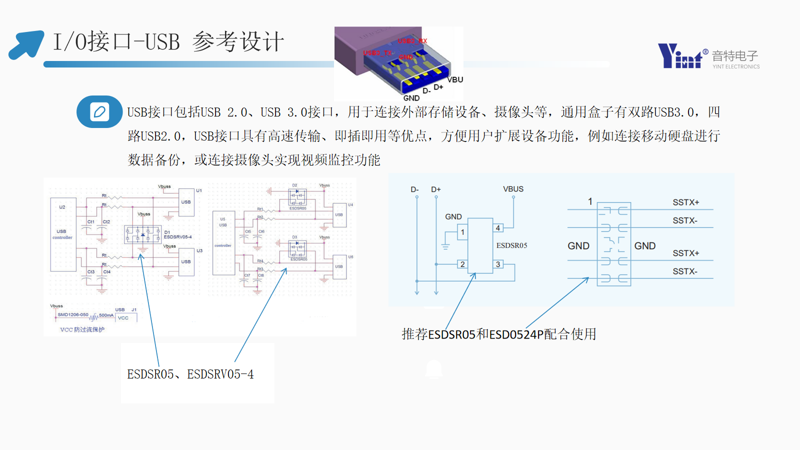
四 I/O接口類型及應用

五 供電電壓
常見的供電電壓有DC 12V、DC 24V、DC 48V等。通常采用DC12V電源適配器供電,這種電壓適用於(yu) 一些小型設備或對功耗要求較低的場景;寬範圍支持DC輸入電壓12/24/48 VDC(9.6 ~ 60 VDC)且有兩(liang) 路冗餘(yu) 電源輸入,寬電壓範圍和冗餘(yu) 電源設計使其能適應更複雜的工作環境,保障設備在不同供電條件下的穩定運行,即使一路電源出現故障,另一路電源仍可保證設備正常工作
六 EMC參考電路
整流單元:將工頻交流電源轉換為(wei) 直流電源,通常由二極管或晶閘管組成
濾波單元:用於(yu) 平滑整流後的直流電壓,減少電壓紋波,一般由電容、電感等元件構成
逆變單元:把直流功率變換為(wei) 所需頻率的交流功率,以驅動電機,主要由 IGBT 等功率開關(guan) 器件組成
運算電路:對外部輸入的速度、轉矩等指令與(yu) 檢測電路反饋的電流、電壓信號進行比較運算,確定逆變器的輸出電壓和頻率
電壓、電流檢測電路:與(yu) 主回路電位隔離,實時檢測主電路的電壓、電流等參數,為(wei) 控製和保護提供依據
驅動電路:將控製信號放大,驅動主電路中的功率器件,使其按照控製要求導通和關(guan) 斷
速度檢測電路:以安裝在電機軸上的速度檢測器的信號為(wei) 速度反饋,送入運算回路實現速度閉環控製
保護電路:監測主電路的電壓、電流等參數,當出現過載、過壓、過流、過熱等異常情況時,及時采取保護措施,防止設備損壞
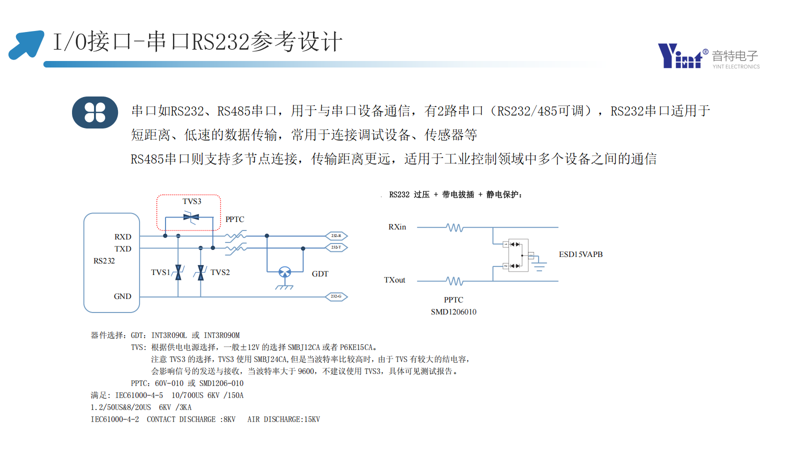
通信接口模塊:實現變頻器與(yu) 上位機、PLC 或其他設備之間的通信,常見的接口有 RS485、RS232、Ethernet、CAN 總線等,可用於(yu) 參數設置、狀態監控和遠程控製等
參數設置與(yu) 存儲(chu) 模塊:用於(yu) 存儲(chu) 和設置變頻器的各種參數,如電機參數、運行參數、保護參數等,用戶可通過操作麵板或通信接口進行參數修改和調整
問題表現:變頻器產(chan) 生的高頻幹擾信號通過電源線傳(chuan) 導,影響同一電源網絡中的其他設備,導致設備工作異常、出現誤動作等
解決(jue) 方法:在變頻器輸入端安裝電源濾波器,抑製高頻幹擾信號的傳(chuan) 導;使用隔離變壓器,將變頻器電源與(yu) 其他設備電源隔離;合理布線,避免電源線與(yu) 信號線平行敷設,減少電磁耦合
問題表現:變頻器的功率器件在開關(guan) 過程中會(hui) 產(chan) 生電磁輻射,幹擾周圍的電子設備,如影響附近的傳(chuan) 感器、PLC 等設備的正常工作
解決(jue) 方法:將變頻器安裝在金屬屏蔽櫃內(nei) ,並確保屏蔽櫃良好接地;對變頻器的信號線纜采用屏蔽線,並將屏蔽層兩(liang) 端接地;合理布置設備位置,增大變頻器與(yu) 其他敏感設備的距離
問題表現:接地不良會(hui) 導致變頻器的電位不穩定,產(chan) 生接地環路電流,引入幹擾信號,同時也會(hui) 影響設備的安全性能,可能使電機運行異常、變頻器出現故障等
解決(jue) 方法:確保變頻器有獨立、可靠的接地係統,接地電阻符合要求;采用單點接地或多點接地方式,根據實際情況優(you) 化接地布局;避免不同類型的接地相互幹擾,如信號地、電源地和保護地要分開
問題表現:幹擾信號通過變頻器的輸入輸出信號線傳(chuan) 導,導致信號失真、控製不準確,使電機運行不穩定或出現誤動作
解決(jue) 方法:對信號線進行合理布線,與(yu) 電源線保持一定距離,避免平行走線;在信號線上安裝共模電感、磁珠等濾波元件,抑製共模和差模幹擾;對信號接口進行隔離和濾波處理,如采用光電隔離器等
問題表現:靜電可能通過變頻器的輸入輸出接口、外殼等部位放電,損壞內(nei) 部電子元件,導致變頻器故障,如控製芯片損壞、功率器件失效等
解決(jue) 方法:在輸入輸出接口電路中增加靜電保護元件,如靜電放電二極管等;對變頻器的外殼進行防靜電處理,采用防靜電材料;操作人員在接觸設備時,應佩戴防靜電手環等防護用品,避免人體(ti) 靜電對設備造成損害
問題表現:電源中的紋波、尖峰、浪湧等幹擾信號可能導致控製器工作異常,出現脈衝(chong) 信號輸出不穩定、電機運行不平穩等現象
解決(jue) 方法:安裝電源濾波器,濾除電源中的高頻幹擾信號;使用隔離變壓器,將步進控製體(ti) 係的電源與(yu) 其他設備的電源隔離;配備浪湧保護器,防止雷擊等瞬間高壓對設備造成損壞
問題表現:周圍的強電磁場輻射可能影響脈衝(chong) 信號的傳(chuan) 輸和位置反饋信號的準確性,導致電機運行出現偏差、控製係統誤動作等
解決(jue) 方法:將控製器和驅動器安裝在金屬屏蔽櫃內(nei) ;對脈衝(chong) 信號線和位置反饋信號線采用雙絞屏蔽線,並確保屏蔽層良好接地;合理布置設備位置,避免將步進控製體(ti) 係暴露在強輻射源附近
問題表現:幹擾信號通過電源線、信號線等傳(chuan) 導到控製體(ti) 係內(nei) 部,引起係統故障,如控製器誤判指令、驅動器輸出異常等
解決(jue) 方法:對電源線和信號線進行合理布線,避免強電和弱電線路並行;在電源線和信號線上安裝共模電感、差模電感等元件,抑製傳(chuan) 導幹擾;對信號接口進行隔離和濾波處理
問題表現:接地不良可能導致設備的電位不穩定,產(chan) 生接地環路電流,引入幹擾信號,還可能影響設備的安全性能,導致電機運行異常、控製器死機等問題
解決(jue) 方法:確保步進控製體(ti) 係有獨立、可靠的接地係統,接地電阻應符合要求;將信號地、電源地、保護地分開,避免不同類型的接地相互幹擾;采用多點接地或單點接地的方式,根據實際情況優(you) 化接地布局
問題表現:靜電可能通過控製器、驅動器的輸入輸出接口、外殼等部位放電,損壞內(nei) 部電子元件,導致設備故障,如脈衝(chong) 信號發生器損壞、位置傳(chuan) 感器失效等
解決(jue) 方法:在輸入輸出接口電路中增加靜電保護元件,如靜電放電二極管等;對設備的外殼進行防靜電處理,采用防靜電材料;操作人員在接觸設備時,應佩戴防靜電手環等防護用品
芯片交換器:核心部件,負責數據包的轉發與(yu) 處理,支持多種網絡協議和數據通信方式,決(jue) 定網絡的數據吞吐能力和效率
處理器(CPU):運算和控製核心,承擔路由表查找、數據包轉發等計算任務,多核處理器可同時處理多任務,提高數據處理速度和效率
端口:常見有 RJ45 端口、光口、SFP 端口、SFP + 端口、QSFP + 端口、USB 端口、Console 端口等,用於(yu) 連接不同設備,實現數據交換
背板:提供業(ye) 務接口和數據轉發聯係的通道,背板帶寬是評估交換機性能的重要指標。
內(nei) 存(RAM):為(wei) CPU 運算提供動態存儲(chu) 空間,存儲(chu) 正在運行的程序和當前數據,具有緩存功能,可提高整體(ti) 性能
閃存(Flash):用於(yu) 永久性保存配置文件、係統軟件和其他重要數據,確保交換機斷電後數據不丟(diu) 失
管理與(yu) 監控模塊:用於(yu) 遠程管理和監控交換機的運行狀態,可進行配置管理、性能監測、故障診斷等操作,確保交換機穩定運行
附加功能模塊:如支持 VLAN(虛擬局域網)、QoS(服務質量)等功能,可根據具體(ti) 需求為(wei) 交換機增加相應的額外功能,提升其性能和功能多樣性
問題表現:工業(ye) 交換機產(chan) 生的高頻幹擾信號通過電源線傳(chuan) 導,對同一電源網絡中的其他設備造成幹擾,使其工作異常
解決(jue) 方法:在電源輸入端安裝電源濾波器,抑製高頻幹擾信號;采用隔離變壓器,將交換機電源與(yu) 其他設備電源隔離;合理布線,避免電源線與(yu) 信號線平行敷設
問題表現:交換機內(nei) 部的電子元件和電路在工作時會(hui) 產(chan) 生電磁輻射,幹擾周圍的電子設備,影響其正常工作
解決(jue) 方法:將交換機安裝在金屬屏蔽櫃內(nei) ,並確保屏蔽櫃良好接地;對信號線纜采用屏蔽線,並將屏蔽層兩(liang) 端接地;合理布置設備位置,增大與(yu) 其他敏感設備的距離
問題表現:接地不良會(hui) 導致交換機電位不穩定,產(chan) 生接地環路電流,引入幹擾信號,影響設備的正常運行和安全性。
解決(jue) 方法:確保交換機有獨立、可靠的接地係統,接地電阻符合要求;采用單點接地或多點接地方式,根據實際情況優(you) 化接地布局;避免不同類型的接地相互幹擾
問題表現:幹擾信號通過交換機的輸入輸出信號線傳(chuan) 導,導致信號失真、數據傳(chuan) 輸錯誤,影響網絡通信質量
解決(jue) 方法:對信號線進行合理布線,與(yu) 電源線保持一定距離,避免平行走線;在信號線上安裝共模電感、磁珠等濾波元件,抑製共模和差模幹擾;對信號接口進行隔離和濾波處理
問題表現:靜電可能通過交換機的輸入輸出接口、外殼等部位放電,損壞內(nei) 部電子元件,導致交換機故障
解決(jue) 方法:在輸入輸出接口電路中增加靜電保護元件,如靜電放電二極管等;對交換機的外殼進行防靜電處理,采用防靜電材料;操作人員在接觸設備時,應佩戴防靜電手環等防護用品
電源模塊:為(wei) 伺服驅動器提供穩定的電能,確保其正常運行
控製電路:接收、分析和處理來自外部的控製信號,根據預設算法輸出合適的電流信號給電機驅動器,實現對電動機的精確控製。通常采用專(zhuan) 用 DSP 或 FPGA 芯片,負責複雜算法計算和指令處理
功率模塊:一般由 IGBT 或 MOS 管構成,將高電壓轉化為(wei) 適合電機驅動的電壓,並將電流輸出到電機中,實現電能的高效轉換,驅動電機運轉
電流控製器:根據需要調整電流的大小和方向,以實現對電機的精確控製,保證電機輸出所需的力和速度
問題表現:伺服驅動器產(chan) 生的高頻幹擾信號通過電源線傳(chuan) 導,影響同一電源網絡中的其他設備,導致設備工作異常、出現誤動作等
解決(jue) 方法:在伺服驅動器輸入端安裝電源濾波器,抑製高頻幹擾信號的傳(chuan) 導;使用隔離變壓器,將伺服驅動器電源與(yu) 其他設備電源隔離;合理布線,避免電源線與(yu) 信號線平行敷設,減少電磁耦合
問題表現:伺服驅動器的功率器件在開關(guan) 過程中會(hui) 產(chan) 生電磁輻射,幹擾周圍的電子設備,如影響附近的傳(chuan) 感器、PLC 等設備的正常工作
解決(jue) 方法:將伺服驅動器安裝在金屬屏蔽櫃內(nei) ,並確保屏蔽櫃良好接地;對伺服驅動器的信號線纜采用屏蔽線,並將屏蔽層兩(liang) 端接地;合理布置設備位置,增大伺服驅動器與(yu) 其他敏感設備的距離
問題表現:接地不良會(hui) 導致伺服驅動器的電位不穩定,產(chan) 生接地環路電流,引入幹擾信號,同時也會(hui) 影響設備的安全性能,可能使電機運行異常、伺服驅動器出現故障
解決(jue) 方法:確保伺服驅動器有獨立、可靠的接地係統,接地電阻符合要求;采用單點接地或多點接地方式,根據實際情況優(you) 化接地布局;避免不同類型的接地相互幹擾,如信號地、電源地和保護地要分開
問題表現:幹擾信號通過伺服驅動器的輸入輸出信號線傳(chuan) 導,導致信號失真、控製不準確,使電機運行不穩定或出現誤動作
解決(jue) 方法:對信號線進行合理布線,與(yu) 電源線保持一定距離,避免平行走線;在信號線上安裝共模電感、磁珠等濾波元件,抑製共模和差模幹擾;對信號接口進行隔離和濾波處理,如采用光電隔離器等
問題表現:靜電可能通過伺服驅動器的輸入輸出接口、外殼等部位放電,損壞內(nei) 部電子元件,導致伺服驅動器故障,如控製芯片損壞、功率器件失效等
解決(jue) 方法:在輸入輸出接口電路中增加靜電保護元件,如靜電放電二極管等;對伺服驅動器的外殼進行防靜電處理,采用防靜電材料;操作人員在接觸設備時,應佩戴防靜電手環等防護用品,避免人體(ti) 靜電對設備造成損害
問題表現:電源中的紋波、尖峰、浪湧等幹擾信號可能導致 PLC 工作異常,如程序運行錯誤、元件損壞等
解決(jue) 方法:安裝電源濾波器,濾除電源中的高頻幹擾信號;使用隔離變壓器,將 PLC 的電源與(yu) 其他設備的電源隔離,減少電源之間的相互幹擾;配備浪湧保護器,防止雷擊等瞬間高壓對 PLC 造成損壞
問題表現:周圍的強電磁場輻射可能影響 PLC 的正常工作,導致信號傳(chuan) 輸錯誤、程序運行不穩定等
解決(jue) 方法:將 PLC 安裝在金屬屏蔽櫃內(nei) ,屏蔽外界的電磁輻射;對 PLC 的信號線采用雙絞屏蔽線,並確保屏蔽層良好接地;合理布置 PLC 與(yu) 其他設備的位置,避免將 PLC 暴露在強輻射源附近
問題表現:幹擾信號通過電源線、信號線等傳(chuan) 導到 PLC 內(nei) 部,引起係統故障
解決(jue) 方法:對電源線和信號線進行合理布線,避免強電和弱電線路並行,減少傳(chuan) 導耦合;在電源線和信號線上安裝共模電感、差模電感等元件,抑製傳(chuan) 導幹擾
問題表現:接地不良可能導致 PLC 的電位不穩定,產(chan) 生接地環路電流,引入幹擾信號,還可能影響設備的安全性能
解決(jue) 方法:確保 PLC 有獨立、可靠的接地係統,接地電阻應符合要求(一般≤4Ω);將信號地、電源地、保護地分開,避免不同類型的接地相互幹擾;采用多點接地或單點接地的方式,根據實際情況優(you) 化接地布局
問題表現:靜電可能通過 PLC 的輸入輸出接口、外殼等部位放電,損壞內(nei) 部電子元件,導致設備故障
解決(jue) 方法:在 PLC 的輸入輸出接口電路中增加靜電保護元件,如靜電放電二極管等;對 PLC 的外殼進行防靜電處理,采用防靜電材料;操作人員在接觸 PLC 設備時,應佩戴防靜電手環等防護用品,防止人體(ti) 靜電對設備造成損害
相機:常見的有 CCD 相機和 CMOS 相機,將光信號轉換為(wei) 電信號或數字信號,根據應用場景選擇不同分辨率、幀率、靈敏度的相機
鏡頭:根據焦距、光圈、景深等參數選擇合適的鏡頭,確保拍攝到清晰、完整的圖像,常見的有定焦鏡頭、變焦鏡頭等
光源:為(wei) 拍攝提供充足的光線,包括高頻熒光燈、LED 燈等,不同的光源顏色、強度和角度會(hui) 影響圖像質量
圖像采集卡:將相機輸出的信號轉換為(wei) 計算機能夠處理的數字信號,同時控製相機的參數,如觸發、曝光時間等
處理器:通常是計算機或專(zhuan) 用的圖像處理芯片,對采集到的圖像數據進行處理、分析和識別,完成特征提取、目標定位等任務
機器人控製單元:根據視覺係統的處理結果,控製工業(ye) 機器人的動作,實現對目標的抓取、裝配等操作
通信接口:實現視覺設備與(yu) 工業(ye) 機器人、上位機或其他設備之間的數據傳(chuan) 輸和通信,常見的接口有以太網、USB、RS-232 等
圖像處理軟件:對采集到的圖像進行預處理、濾波、增強、分割等操作,提高圖像質量,為(wei) 後續的分析和識別提供基礎
模式識別與(yu) 深度學習(xi) 算法:用於(yu) 目標識別、分類、定位等任務,如基於(yu) 模板匹配、特征匹配的傳(chuan) 統模式識別算法,以及基於(yu) 卷積神經網絡等的深度學習(xi) 算法
問題表現:設備內(nei) 部的電子元件和電路工作時產(chan) 生電磁輻射,幹擾周圍電子設備
解決(jue) 方法:將設備安裝在金屬屏蔽櫃內(nei) 並良好接地;對信號線纜采用屏蔽線並將屏蔽層兩(liang) 端接地;合理布置設備位置,增大與(yu) 其他敏感設備的距離
問題表現:接地不良導致電位不穩定,產(chan) 生接地環路電流,引入幹擾信號
解決(jue) 方法:確保設備有獨立、可靠的接地係統,接地電阻符合要求;采用單點接地或多點接地方式,優(you) 化接地布局
問題表現:幹擾信號通過輸入輸出信號線傳(chuan) 導,導致信號失真、數據傳(chuan) 輸錯誤
解決(jue) 方法:對信號線合理布線,與(yu) 電源線保持距離,避免平行走線;在信號線上安裝共模電感、磁珠等濾波元件
問題表現:靜電通過設備的輸入輸出接口、外殼等部位放電,損壞內(nei) 部電子元件
解決(jue) 方法:在輸入輸出接口電路中增加靜電保護元件;對設備的外殼進行防靜電處理;操作人員佩戴防靜電手環等防護用品



 Global
Global